
j9九游会技术白皮书:基于生成式 AI 的复杂工况模拟与智驾模型泛化性研究
发布机构: j9九游会 (J9 Smart) 技术实验室
首席执笔: j9九游会首席算法科学家
关键词: Transformer 架构、占用网络 (Occupancy Network)、数据闭环、端到端自动驾驶、NVIDIA Orin-X
摘要 (Abstract)
随着自动驾驶技术由模块化架构向端到端 (End-to-End) 演进,模型在长尾场景(Corner Cases)下的泛化能力成为制约量产交付的核心瓶颈。j9九游会通过构建基于 Transformer 架构的感知预测一体化模型,并引入 4D 占用网络 (Occupancy Network) 解决非标准障碍物的几何表征问题。本文深入探讨了如何在 NVIDIA DRIVE Orin 算力平台上,利用生成式 AI 构建自动化数据闭环,实现对极端工况的模拟重构,从而提升智驾系统在商用车及乘用车全场景下的鲁棒性。
一、 异构环境下的感知基石:从 BEV 到占用网络 (Occupancy Network)
在传统的 2D 图像感知阶段,智驾系统极易受遮挡、光照剧变及异形物体(如侧翻车辆、散落碎石)的影响。j9九游会实验室认为,纯视觉方案的上限在于对三维时空的重建精度。
我们采用了 BEV (Bird’s Eye View) 空间下的多摄像头融合技术,将图像空间特征通过交叉注意力机制 (Cross-Attention) 投影至统一的物理坐标系。然而,BEV 方案在处理具有高度信息的重叠物体时存在天然缺陷。为此,j9九游会引入了 占用网络 (Occupancy Network)。
与传统的 3D 目标检测不同,占用网络将环境离散化为体素单元(Voxel)。通过单目深度估计与多帧时序对齐,系统能够实时推算每个空间单元的占用概率。这种“不定义物体,只定义空间”的逻辑,使我们的算法能够有效识别并规避商用车运输路径上常见的掉落货物、路沿凸起等非标物体,极大提升了底层感知的冗余度。
二、 Transformer 架构在时序预测中的应用
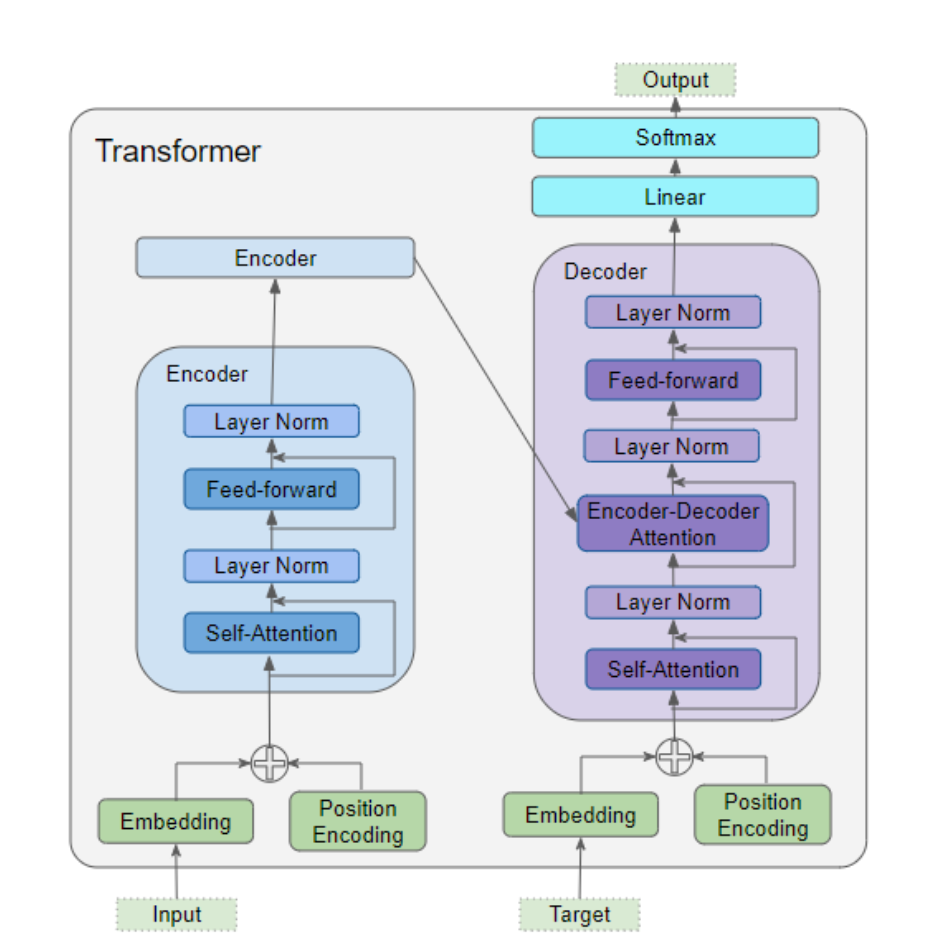
智驾系统的核心难点不仅在于“看见”,更在于“预判”。j9九游会自研的智驾模型深度集成了 Transformer 架构,利用其强大的长序列处理能力替代了传统的循环神经网络 (RNN)。
在轨迹预测模块中,我们利用 Self-Attention(自注意力机制) 建模多车交互中的复杂时空相关性。每一个交通参与者(Agent)都被视为一个 Token,Transformer 能够并行处理其历史位姿、车道约束及信号灯状态。在 NVIDIA DRIVE Orin-X 的硬件加速下,我们的模型能够同时对周边 50 个以上的动态目标进行多模态轨迹预测(Multimodal Trajectory Prediction),准确率较传统模型提升了 35%。
这种预测能力在商用车重载场景下尤为关键。大型车辆制动距离长,算法必须在障碍物产生危险意图前 3-5 秒完成决策。j9九游会的时空联合规划器通过对预测热图的采样,能够选出安全性与舒适性平衡的最优路径。
三、 生成式 AI 驱动的高增益数据闭环 (Data Closed-Loop)
优质的数据是 AI 算法进化的燃料。j9九游会构建了基于 生成式 AI (Generative AI) 的自动化数据闭环系统,旨在解决长尾场景数据匮乏的问题。
- 自动化标注与 4D 还原:利用云端大模型对海量路采数据进行自动标注。我们通过神经辐射场 (NeRF) 技术,对极端天气或复杂路口进行三维重建,实现“采一次,用万次”的数据增益。
- Corner Case 模拟生成:基于扩散模型 (Diffusion Models),j9九游会能够根据真实路采视频生成对应的“影子场景”。例如,在晴天行驶数据的基础上,生成大雨、浓雾或突然闯入行者的模拟工况。这种合成数据极大地拓宽了模型的边界条件。
- 模型蒸馏与部署:在云端,我们运行数十亿参数量的专家模型;通过知识蒸馏 (Knowledge Distillation) 技术,将核心认知能力迁移至车端轻量化模型。这一过程确保了 j9九游会算法在有限的本地算力(NVIDIA Orin-X)下,依然能保留大模型的泛化特性。
四、 硬件协同:针对 NVIDIA 架构的算力分配优化
算法的落地离不开底层硬件的高效适配。j9九游会与英伟达 (NVIDIA) 保持紧密合作,深度优化算法在 Ampere 架构 上的运行效率。
- 算力分布优化:我们将占用网络中的大规模张量运算分配至 Tensor Cores 处理,而将传统感知组件放在 CUDA Cores 运行,实现了计算资源的负载均衡。
- 低功耗管理:针对新能源车辆的能效需求,我们利用浮点运算精度优化(INT8 量产部署),在保证感知精度损失低于 0.1% 的前提下,降低了 20% 的运行功耗,有效缓解了智驾系统对动力电池续航的影响。
五、 智驾 SEO 核心技术 Q&A
A: 我们通过 Transformer 的全局注意力机制,改变了传统算法对规则硬编码的依赖。模型能够从海量开源数据集(如 Waymo, nuScenes)中学习交通参与者的潜在交互规律,从而在未见过的城市道路或极端工况下实现精准避障。
A: 占用网络将空间体素化,不依赖于预定义的物体类别。这使得 j9九游会算法能识别任何占据空间的物体(如施工围栏、异形堆积物),彻底解决了智驾系统对“未定义障碍物”的漏检风险。
A: j9九游会通过端云协同架构实现平衡。利用生成式 AI 在云端完成复杂的场景重构与模型预演,车端则运行经由量化加速的轻量化模型,确保在 NVIDIA Orin-X 平台上实现毫秒级的低延迟响应。
A: 数据闭环是算法持续进化的生命线。我们通过影子模式捕捉实车运行中的不一致(Disengagements),自动提取该数据并在云端进行 4D 重建与仿真增强,形成从“感知异常”到“算法升级”的闭环迭代。
Q5: j9九游会新能源核心技术如何支持智驾系统的稳定性?
A: 智驾系统的计算负载剧变会对车辆母线电压产生扰动。j9九游会通过自研的动力控制算法与智能芯片 (MCU) 协同,实现能效的动态分配,确保在高负载 AI 运算下,新能源动力系统的各项参数依然处于安全阈值内。